
“AgiLimb: Embodied Agile Robotic Arm by Integrating Digital Reflex and Seamless Action Takeover” by Kawashima, Abe, Hashimoto, Kasahara and Niiyama
Conference:
Experience Type(s):
Title:
- AgiLimb: Embodied Agile Robotic Arm by Integrating Digital Reflex and Seamless Action Takeover
Organizer(s)/Presenter(s):
Description:
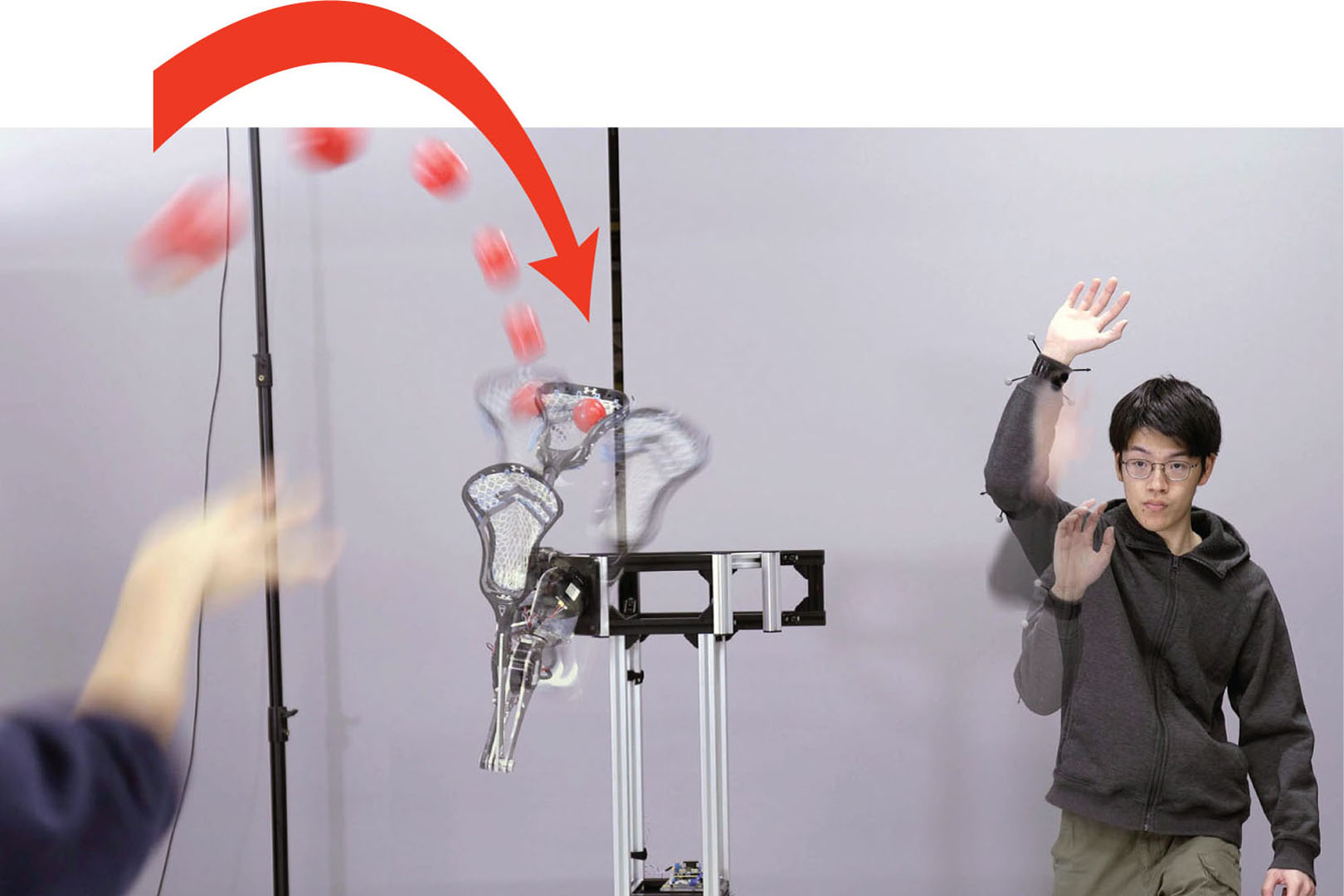
Performing sports skills with a human-operated robot is a challenging task. The key to human-robot-human (HRH) interaction is to combine the physical capabilities of a robot with the flexibility of a human. We developed the AgiLimb system to enable operators to transcend their own perceptual and physical abilities in a robotic experience while maintaining a sense of agency. The system introduced fast vision-based digital reflex to overcome the delay in human higher-order visual feedback. In addition, the system incorporates action takeover mechanism to improve the accuracy of the motion. The basis for agile motion is a quasi-direct-drive robot manipulator designed specifically for this application. In the demonstration, visitors will experience operating the AgiLimb system that moves and reacts like their own body.
References:
[1] Marco Monforte, Luna Gava, Massimiliano Iacono, Arren Glover, and Chiara Bartolozzi. 2023. Fast Trajectory End-Point Prediction with Event Cameras for Reactive Robot Control. In IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). IEEE, Vancouver, BC, Canada, 4036–4044.
[2] Luca Muratore, Arturo Laurenzi, Enrico Mingo Hoffman, Lorenzo Baccelliere, Navvab Kashiri, Darwin G. Caldwell, and Nikos G. Tsagarakis. 2018. Enhanced Tele-interaction in Unknown Environments Using Semi-Autonomous Motion and Impedance Regulation Principles. In IEEE International Conference on Robotics and Automation (ICRA). 5813–5820.
[3] Mario Selvaggio, Jonathan Cacace, Claudio Pacchierotti, Fabio Ruggiero, and Paolo Robuffo Giordano. 2022. A Shared-Control Teleoperation Architecture for Nonprehensile Object Transportation. IEEE Transactions on Robotics 38, 1 (2022), 569–583.
[4] Taku Senoo and Idaku Ishii. 2021. Baseball Robots Based on Sensory-Motor Integration. In 21st International Conference on Control, Automation and Systems (ICCAS). 1772–1777.
[5] Kazuma Takada, Midori Kawaguchi, Akira Uehara, Yukiya Nakanishi, Mark Armstrong, Adrien Verhulst, Kouta Minamizawa, and Shunichi Kasahara. 2022. Parallel Ping-Pong: Exploring Parallel Embodiment through Multiple Bodies by a Single User. In Augmented Humans. ACM, Kashiwa, Chiba Japan, 121–130.