
“A Demonstration of Selfrionette: A Force-Input Controller for Continuous Full-Body Avatar Manipulation and Enhanced Virtual Haptics” by Hirao and Hashimoto
Conference:
Experience Type(s):
Title:
- A Demonstration of Selfrionette: A Force-Input Controller for Continuous Full-Body Avatar Manipulation and Enhanced Virtual Haptics
Organizer(s)/Presenter(s):
Description:
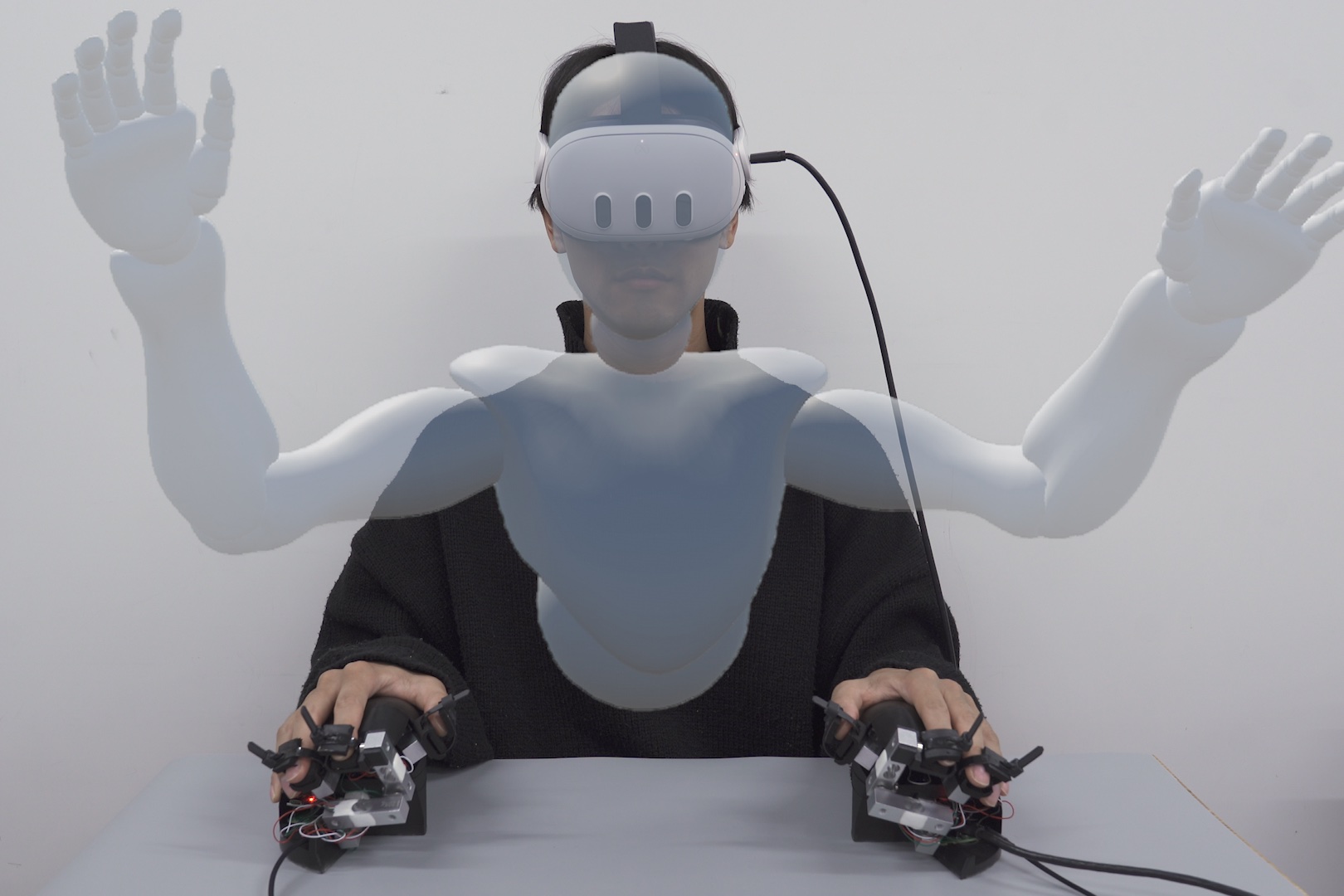
This paper proposes a grasped-type controller that utilizes user’s fingers’ force-inputs into an embodied and continuous virtual self body motion in virtual reality. The proposed system allows users embodied interactions with virtual objects and walk in VR only by their physical fingers’ force-inputs, and therefore, it has a potential to overcome users’ physical and spatial constraints of a physical environment. Moreover, the force-input can present a reaction force to the user’s finger. The proposed system takes into account the physical property of interacting objects and adjusts relationship between force input and virtual body motion to achieve realistic haptic interaction.
References:
[1] Takeru Hashimoto and Yutaro Hirao. 2024. Selfrionette: A Fingertip Force-Input Controller for Continuous Full-Body Avatar Manipulation and Diverse Haptic Interactions. In Proceedings of the 37th Annual ACM Symposium on User Interface Software and Technology (Pittsburgh, PA, USA) (UIST ’24). Association for Computing Machinery, New York, NY, USA.
[2] Takeru Hashimoto, Shigeo Yoshida, and Takuji Narumi. 2022. MetamorphX: An Ungrounded 3-DoF Moment Display that Changes its Physical Properties through Rotational Impedance Control. In Proceedings of the 35th Annual ACM Symposium on User Interface Software and Technology (Bend, OR, USA) (UIST ’22). Association for Computing Machinery, New York, NY, USA, Article 72, 14 pages.
[3] Yutaro Hirao, Takuji Narumi, Ferran Argelaguet, and Anatole Lecuyer. 2023. Move or Push? Studying Pseudo-Haptic Perceptions Obtained with Motion or Force Input. (Nov. 2023). arxiv:https://arXiv.org/abs/2311.15546 [cs.HC]
[4] Pamela Svensson, Ulrika Wijk, Anders Björkman, and Christian Antfolk. 2017. A review of invasive and non-invasive sensory feedback in upper limb prostheses. Expert Rev. Med. Devices 14, 6 (June 2017), 439–447.