
“ForceField: Visualizing Intermaterial Interaction through Floor and Depth Sensing” by Yoshida, Watanabe, Asahi, Rin, Kozuka, et al. …
Conference:
Experience Type(s):
Title:
- ForceField: Visualizing Intermaterial Interaction through Floor and Depth Sensing
Organizer(s)/Presenter(s):
Description:
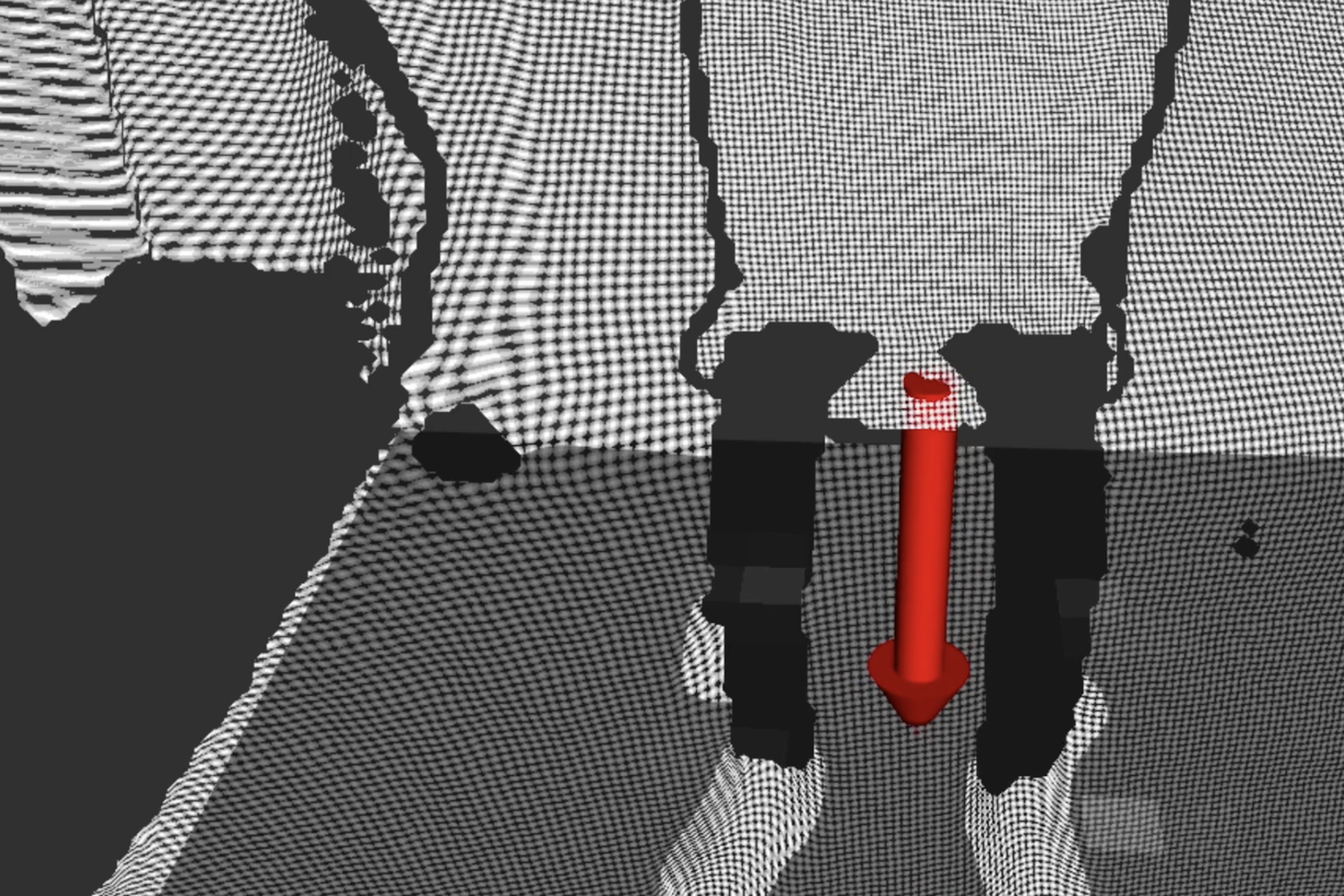
ForceField realizes the measurement of intermaterial contact forces across any surface within a room-scale environment without the need for additional device attachments to bodies or objects. It achieves this by acquiring a 3D model through a depth sensor and capturing ground pressure through a floor sensor, and then reconstructing contact forces between surfaces where no sensors are attached, such as when a hand pushes a desk, or people push against each other, from information on force and geometry. Through this unobtrusive environmental measurement approach, ForceField opens up the possibility of highly physical spatial interactions in domains such as healthcare, sports, and entertainment.
References:
[1] Hiroshi Ishii and Brygg Ullmer. 1997. Tangible bits: towards seamless interfaces between people, bits and atoms. In Proceedings of the ACM SIGCHI Conference on Human factors in computing systems. 234–241.
[2] Sean Kean, Jonathan C Hall, Phoenix Perry, Sean Kean, Jonathan C Hall, and Phoenix Perry. 2011. Microsoft’s kinect sdk. Meet the Kinect: An Introduction to Programming Natural User Interfaces (2011), 151–173.
[3] Tomomasa Sato, Tatsuya Harada, and Taketoshi Mori. 2004. Environment-type robot system” RoboticRoom” featured by behavior media, behavior contents, and behavior adaptation. IEEE/ASME Transactions on Mechatronics 9, 3 (2004), 529–534.
[4] Takatoshi Yoshida, Narin Okazaki, Ken Takaki, Masaharu Hirose, Shingo Kitagawa, and Masahiko Inami. 2022. Flexel: A Modular Floor Interface for Room-Scale Tactile Sensing. In Proceedings of the 35th Annual ACM Symposium on User Interface Software and Technology. 1–12.
[5] Takatoshi Yoshida, Xiaoyan Shen, Koichi Yoshino, Ken Nakagaki, and Hiroshi Ishii. 2019. SCALE: Enhancing Force-based Interaction by Processing Load Data from Load Sensitive Modules. In Proceedings of the 32nd Annual ACM Symposium on User Interface Software and Technology. 901–911.